Vibration Robot
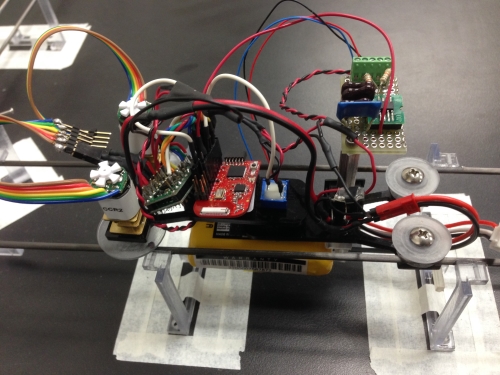
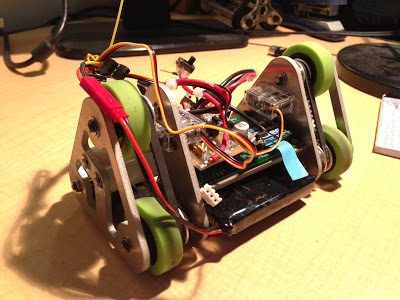
Many animals exploit structural vibration as a means of communication or to sense their surroundings, so why not robots? For this project I developed a vibration transducing mobile robot platform; the idea is that multiple robots on a common substrate can communicate and percieve information about the environment purely using vibration. Due to the dispersive nature of structural bending waves (unlike speech, wavespeed is a function of frequency!) new methods for conveying information were developed. This work was done in fulfillment of my master's degree.